หลักการสำรวจหาตำแหน่งพื้นโลกด้วยดาวเทียม GPS
หลักการกำหนดตำแหน่งบนโลกด้วยระบบดาวเทียม GPS
(Global Positioning System: GPS)
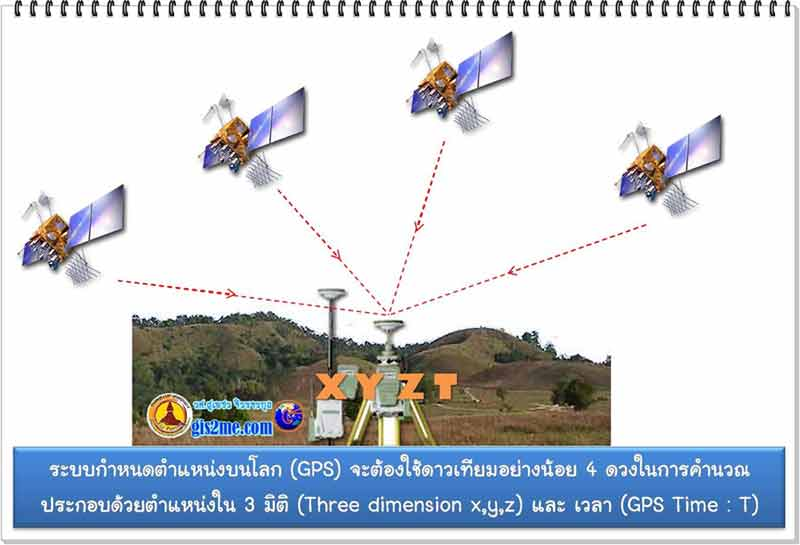
ระบบกำหนดตำแหน่งบนโลก (GPS) คือระบบนำทางด้วยดาวเทียมที่พัฒนาโดยกระทรวงกลาโหมของสหรัฐอเมริกา เพื่อให้สามารถระบุตำแหน่งบนพื้นผิวโลกได้ในลักษณะ สามมิติ (X, Y, Z) ร่วมกับเวลา (T) อย่างแม่นยำ ตลอด 24 ชั่วโมง และไม่จำกัดเงื่อนไขด้านสภาพอากาศ
โครงสร้างพื้นฐาน
ระบบ GPS ประกอบด้วย:
- ดาวเทียมอย่างน้อย 24 ดวง โคจรอยู่ที่ระดับความสูงประมาณ 20,200 กิโลเมตร
- ดาวเทียมจะแบ่งเป็น 6 วงโคจร โดยแต่ละวงมีดาวเทียม 4 ดวง ทำให้ทั่วทุกพื้นที่บนโลกสามารถเห็นดาวเทียมอย่างน้อย 4 ดวงพร้อมกันตลอดเวลา
การกำหนดตำแหน่งบนพื้นโลกโดยอาศัย Global Positioning System (GPS) จำเป็นต้องใช้ข้อมูลระยะห่างจากดาวเทียม และ พิกัดตำแหน่งของดาวเทียม ที่ทราบล่วงหน้า จึงจะสามารถคำนวณหาตำแหน่งของเครื่องรับได้อย่างแม่นยำ โดยอาศัยการอ้างอิงตำแหน่งของดาวเทียมซึ่งมีวงโคจรแน่นอนและอยู่ภายใต้การควบคุมจากสถานีภาคพื้นดิน
ข้อมูลตำแหน่งของดาวเทียมดังกล่าวเรียกว่า อีฟิเมอริสดาวเทียม (Satellite Ephemeris) ซึ่งได้จากการสังเกตการณ์โดยสถานีติดตามภาคพื้น สำหรับการใช้งานที่ต้องการความแม่นยำสูง เช่น งานรังวัดหรือแผนที่ ควรใช้ค่าพิกัดที่ได้จากวงโคจรจริงซึ่งคำนวณภายหลังการรับสัญญาณ GPS แล้ว
การคำนวณระยะทางระหว่างเครื่องรับ GPS กับดาวเทียมกระทำโดยการวัดเวลาที่สัญญาณคลื่นวิทยุใช้ในการเดินทางจากดาวเทียมมายังเครื่องรับ และนำเวลาไปคูณกับ ความเร็วของคลื่นแม่เหล็กไฟฟ้า (ประมาณ 300,000 กิโลเมตรต่อวินาที) เพื่อให้ได้ค่าระยะทาง
หลักการคำนวณตำแหน่ง
เครื่องรับสัญญาณ GPS จะทำหน้าที่รับสัญญาณคลื่นวิทยุที่ส่งมาจากดาวเทียม โดยภายในสัญญาณนั้นจะมีข้อมูลเกี่ยวกับ:
- พิกัดของดาวเทียม ณ ขณะส่งสัญญาณ
- เวลา ที่ส่งสัญญาณออกมา
เมื่อเครื่องรับรับสัญญาณจากดาวเทียม อย่างน้อย 4 ดวง ได้พร้อมกัน จะสามารถนำค่าความต่างของเวลาเดินทางของสัญญาณมาใช้คำนวณเป็น ระยะทาง จากเครื่องรับไปยังดาวเทียมแต่ละดวง ตามสมการ: ระยะทาง=เวลา×ความเร็วของแสง (300,000 km/s)\text{ระยะทาง} = \text{เวลา} \times \text{ความเร็วของแสง (300,000 km/s)}ระยะทาง=เวลา×ความเร็วของแสง (300,000 km/s)
ด้วยการวัดระยะทางจากดาวเทียมหลายดวงเหล่านี้ เครื่องรับสามารถคำนวณตำแหน่งของตนเองได้ด้วยการหาจุดตัดของ ทรงกลม (Sphere Intersection) ซึ่งมีศูนย์กลางเป็นตำแหน่งของดาวเทียมแต่ละดวง และรัศมีเท่ากับระยะทางที่วัดได้
เงื่อนไขการคำนวณ
การคำนวณพิกัดต้องแก้สมการ 4 ตัวแปร คือ:
- X – พิกัดทางตะวันออก-ตะวันตก
- Y – พิกัดทางเหนือ-ใต้
- Z – พิกัดระดับความสูง
- T – ค่าความคลาดเคลื่อนของนาฬิกาในเครื่องรับ
ดังนั้นการรับสัญญาณจากดาวเทียม 4 ดวง ขึ้นไปจึงเป็นเงื่อนไขขั้นต่ำเพื่อให้สามารถแก้สมการเหล่านี้ได้อย่างครบถ้วนและแม่นยำ
กระบวนการวัดระยะดังกล่าวเรียกว่า เรนจิง (Ranging) ซึ่งต้องทำพร้อมกันอย่างน้อย สามระยะ จาก สามดาวเทียม ที่ไม่อยู่ในระนาบเดียวกัน เพื่อกำหนดตำแหน่งในเชิงพื้นที่ผ่านจุดตัดของทรงกลมสามลูก หากใช้เพียงสองระยะทาง จะเกิดจุดตัดสองจุด ทำให้ไม่สามารถระบุตำแหน่งที่แน่นอนได้ แต่เมื่อใช้สามหรือสี่ดาวเทียมขึ้นไป จะสามารถคำนวณค่าพิกัด X, Y, Z ได้แม่นยำยิ่งขึ้น โดยการใช้ดาวเทียมดวงที่สี่จะช่วยในการคำนวณ ค่าความคลาดเคลื่อนด้านเวลา (T) ของนาฬิกาเครื่องรับ ทำให้ได้ผลลัพธ์ในลักษณะ Four-Dimensional Positioning (XYZT)
นอกจากนี้ ตำแหน่งสัมพัทธ์ของดาวเทียมที่มองเห็นจากเครื่องรับส่งผลโดยตรงต่อความถูกต้องของการกำหนดตำแหน่ง ค่าความแม่นยำนี้เรียกว่า เรขาคณิตดาวเทียม (Satellite Geometry) และมักประเมินด้วยค่า GDOP (Geometric Dilution of Precision) ค่ายิ่งต่ำยิ่งแสดงถึงความแม่นยำในการระบุตำแหน่งที่สูง
ปัจจัยที่มีผลต่อความแม่นยำ
- ตำแหน่งของดาวเทียม เมื่อเทียบกับเครื่องรับ (Geometry) ซึ่งประเมินด้วยค่าที่เรียกว่า GDOP (Geometric Dilution of Precision)
- สิ่งกีดขวางทางกายภาพ เช่น ตึกสูงหรือภูเขา อาจรบกวนการรับสัญญาณ
- ชั้นบรรยากาศ โดยเฉพาะ ชั้นไอโอโนสเฟียร์ และ โทรโพสเฟียร์ ซึ่งมีผลต่อความเร็วของสัญญาณ