การกำหนดตำแหน่งของ GPS จากดาวเทียม
หลักการกำหนดตำแหน่งของระบบ GPS
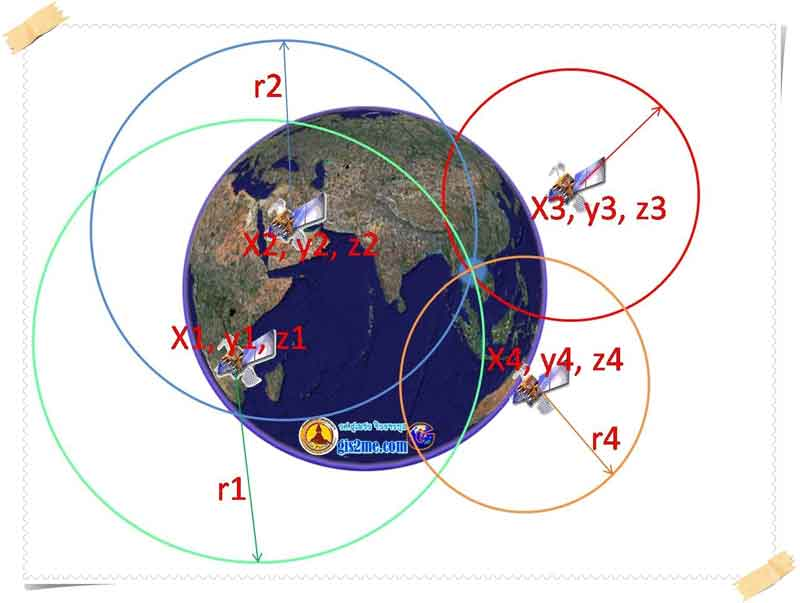
ระบบ Global Positioning System (GPS) มีหลักการทำงานโดยใช้คลื่นวิทยุจากดาวเทียมโคจรซึ่งส่งสัญญาณข้อมูลไปยังเครื่องรับภาคพื้นดิน การคำนวณตำแหน่งอาศัยการเปรียบเทียบรหัส C/A จากสัญญาณที่ดาวเทียมส่งมากับรหัสที่เครื่องรับสร้างขึ้น หากรหัสตรงกัน จะสามารถคำนวณ “เวลา” ที่สัญญาณเดินทางจากดาวเทียมมายังเครื่องรับ และนำเวลาไปคูณกับความเร็วของแสง (≈ 300,000 กม./วินาที) เพื่อหาค่า “ระยะทาง” ที่เรียกว่า ซูโดเรนจ์ (Pseudorange)
โดยทั่วไป การคำนวณพิกัดที่แม่นยำต้องใช้สัญญาณจากดาวเทียมอย่างน้อย 4 ดวง เพื่อระบุตำแหน่ง 3 มิติ (X, Y, Z) และ ค่าความคลาดเคลื่อนของเวลา (T)
ประเภทของเครื่องรับ GPS และวิธีการกำหนดตำแหน่ง
1. เครื่องรับแบบนำหน (Navigation Receiver):
เครื่องรับชนิดนี้ใช้ในการหาพิกัดโดยตรงจากซูโดเรนจ์ และสามารถคำนวณตำแหน่งได้ทันทีหากรับสัญญาณจากดาวเทียมครบ 4 ดวง ความแม่นยำอยู่ในช่วง ±10–25 เมตร ขึ้นอยู่กับคุณภาพของสัญญาณและสภาพแวดล้อม
- การกำหนดตำแหน่งแบบสัมบูรณ์ (Absolute Positioning):
ใช้เครื่องรับเพียงเครื่องเดียวเพื่อตรวจวัดตำแหน่งพิกัด ณ จุดใดจุดหนึ่งโดยไม่ต้องอ้างอิงตำแหน่งอื่น - การกำหนดตำแหน่งแบบสัมพัทธ์ (Relative Positioning):
ใช้เครื่องรับอย่างน้อย 2 เครื่อง โดยวางเครื่องหนึ่งไว้ที่ “สถานีฐาน (Base Station)” ที่รู้พิกัดแน่นอน และอีกเครื่องวางที่ “จุดรีโมต” เพื่อตรวจสอบค่าตำแหน่งเปรียบเทียบ ข้อมูลจากทั้งสองจุดจะถูกใช้ในการแก้ไขค่าคลาดเคลื่อน (Systematic Error) เช่น ความคลาดเคลื่อนจากวงโคจร, บรรยากาศ และนาฬิกา ซึ่งช่วยให้ได้ตำแหน่งที่แม่นยำในระดับ 2–5 เมตร
2. เครื่องรับแบบรังวัด (Survey-grade Receiver):
เครื่องรับแบบนี้ใช้เทคนิค Carrier Phase แทนการใช้รหัส C/A เพื่อให้การวัดมีความแม่นยำสูงขึ้น มีความสามารถในการประมวลผลคลื่นเต็มรอบเพื่อระบุระยะห่างที่แม่นยำยิ่งขึ้น โดยอาศัยเวลารับข้อมูลนานขึ้นและวิธีการประมวลผลร่วมกันจากหลายจุด
วิธีการรังวัดด้วยเครื่อง Survey-grade
- Static Survey (การรังวัดแบบสถิต):
ใช้เครื่องรับอย่างน้อย 2 เครื่องวางประจำตำแหน่งนิ่งเป็นเวลานาน (≥ 1 ชม.) เพื่อประมวลผลหาระยะทางจากจำนวนคลื่นเต็มรอบ ใช้ได้ในพื้นที่ห่างกันหลายสิบกิโลเมตร - Kinematic Survey (การรังวัดแบบจลน์):
พัฒนาเพื่อรังวัดจุดต่างๆ ในเวลารวดเร็ว โดยต้องเริ่มงาน (Initialization) ก่อนเคลื่อนย้าย และต้องรักษาการรับสัญญาณดาวเทียม 4 ดวงอย่างต่อเนื่อง - Pseudostatic Survey (การรังวัดแบบกึ่งสถิต):
เป็นการรังวัดระยะสั้นในแต่ละจุดโดยไม่ต้องล็อกสัญญาณขณะเคลื่อนที่ คล้าย static แต่ใช้เวลาน้อยลง - Rapid Static Survey (การรังวัดแบบสถิตอย่างเร็ว):
ใช้เวลารับข้อมูลสั้น (~10 นาที) สำหรับจุดที่ห่างจากสถานีอ้างอิงไม่เกิน 5–15 กม. - Real-Time Kinematic Survey หรือ RTK:
เป็นการประมวลผลและแสดงค่าตำแหน่งแบบ Real-Time ในสนาม โดยเครื่องรับที่ “จุดเป้าหมาย” รับข้อมูลแก้ไขตำแหน่งจาก “สถานีฐาน” ผ่านคลื่นวิทยุ เพื่อให้ได้ค่าตำแหน่งที่แม่นยำทันที
สรุป
ระบบ GPS อาศัยการรับสัญญาณจากดาวเทียมหลายดวงและการคำนวณทางคณิตศาสตร์ผ่านเทคนิคต่างๆ เพื่อให้ได้ค่าพิกัดตำแหน่งที่แม่นยำ ทั้งในรูปแบบการนำทางทั่วไปและการสำรวจรังวัดระดับวิศวกรรม โดยมีความแม่นยำตั้งแต่ระดับเมตรจนถึงระดับเซนติเมตร ขึ้นกับวิธีการใช้งาน อุปกรณ์ และการประมวลผล